Deo Trailer
About Deo
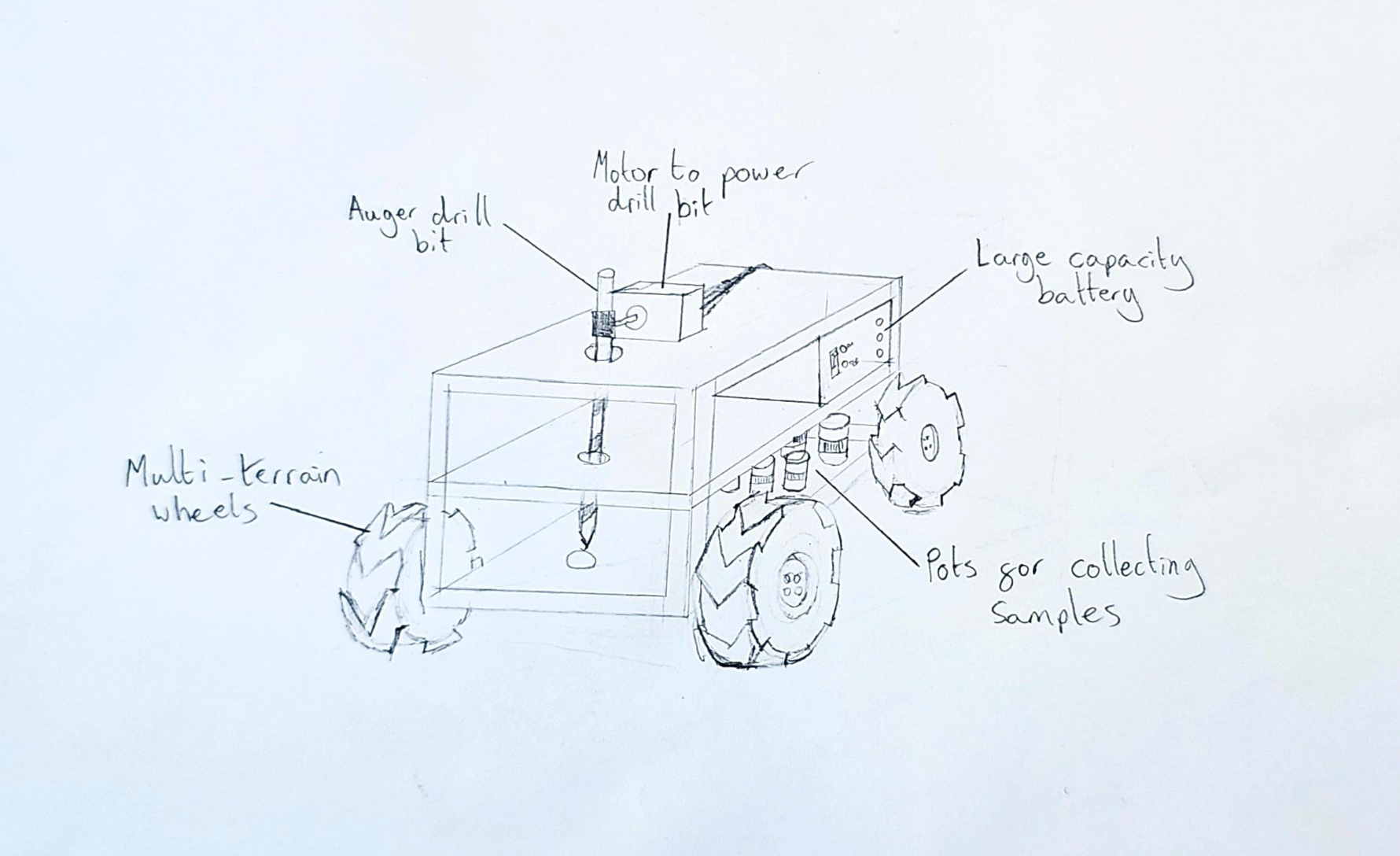
Named after the Greek goddess of agriculture, Deo is an autonomous soil sampling robot for PCN and nutrient testing on farms. It aims to automate the entire process of taking soil samples, from entering a field to having the samples in sealed pots. Controlled by a website hosted directly on the robot, all a user needs to do is trace the boundaries of the field and Deo will do the rest. It generates appropriate sample locations, navigates to them, drills a sample, and places it in a sealed, labelled pot ready for shipment to a soil testing facility.
Design Elements
Sample Location Selection
From field bounds inputted by the user on the website, sample locations are generated in the industry-standard W pattern at a rate of 45 locations per acre.
Navigation and Locomotion
Using highy precise GNSS co-ordinates and an integrated compass, Deo can navigate to sample locations autonomously. With its four powerful motorised wheels, Deo can easily traverse uneven ground and steep inclines for effective locomotion on any terrain. Inside the chasis are four lead acid batteries totalling 30AH, plenty of power to fuel the robot through multiple fields.
Sample Collection
Through use of a serrated drill mechanism, Deo punches above its weight class with its ability to collect 15cm depth cores. The drill has an internal diameter of 20mm and the sample is removed from the tube using a motorised plunger
Sample Storage
Samples are taken from the drill to storage pots using a gantry, mounted on the top of the robot. The pots are then sealed with a barcoded lid using the same gantry system. These barecodes can trace the sample to the exact co-ordinates it was taken from and the time and date of when it was taken.
Safety
Deo is fitted with an array of safety features including an emergency stop button, fuses to the batteries and drill, and guards around all high-torque gears. It can also be controlled with a regualar bluetooth gaming controller if needed.
Drilling Process
Gantry System
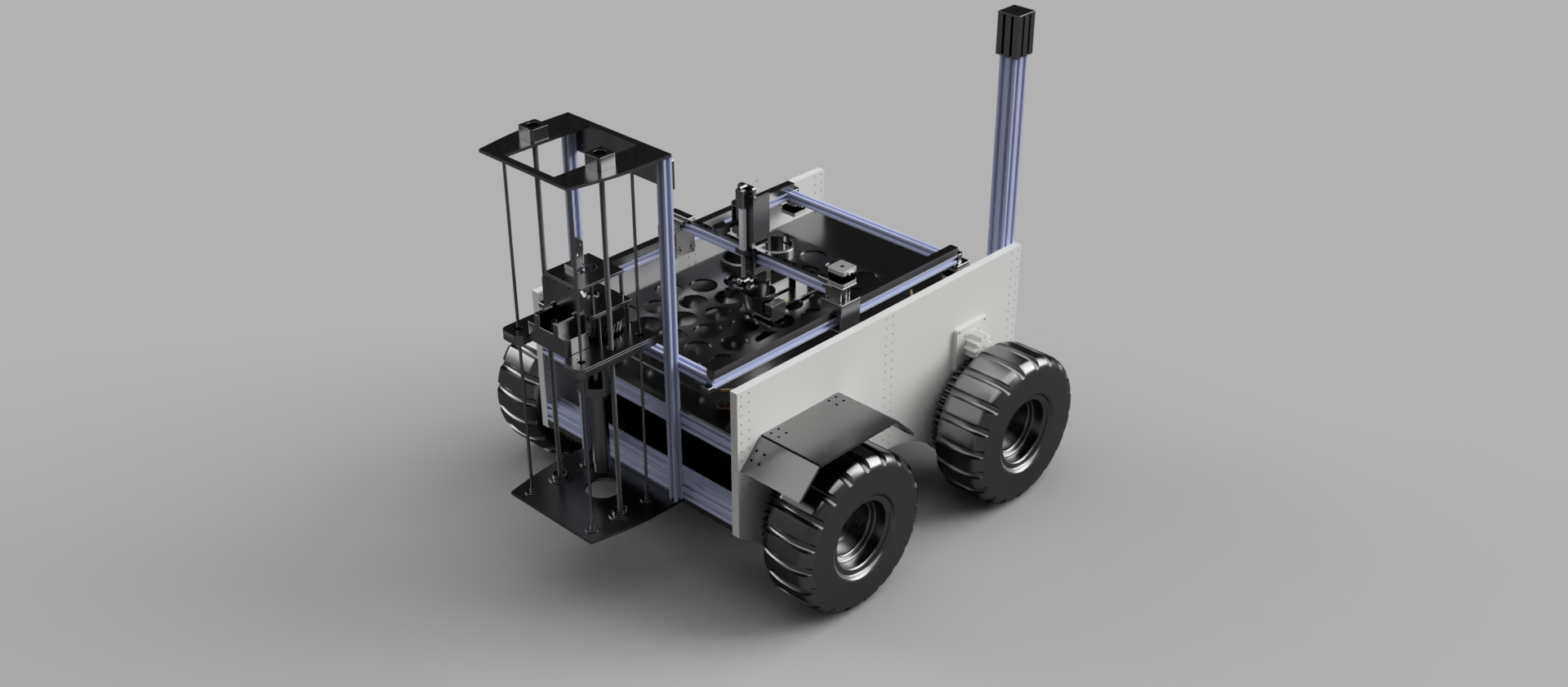
Realising The Concept
Design and modelling
Navigation System

Progression Showreel
Team

Edward Amatiello
Daniel Ward

Amy While

Frankie De Vos